Ё-МАЁ написал(а):
Не верный вывод , Ракета летит сразу в точку встречи .
За 33 сек полёта точка встречи может изменится
 |
 |
 |
 |
 |
 |
 |
|---|
Как сбит MH17: гражданское расследование |
Привет, Гость! Войдите или зарегистрируйтесь.
Вы здесь » Как сбит MH17: гражданское расследование » Отчёты, расследования, экспертизы » Как летает ракета 9М38. Моделирование.

Не верный вывод , Ракета летит сразу в точку встречи .
За 33 сек полёта точка встречи может изменится
За 33 сек полёта точка встречи может изменится
Может ,На полёт ракеты и цели оказывают влияние многие факторы ,Потому и реальная точка встречи НИКОГДА не совпадает с рассчитанной точкой .Но отклонение траектории будет в единицы градусов .
Может ,На полёт ракеты и цели оказывают влияние многие факторы ,Потому и реальная точка встречи НИКОГДА не совпадает с рассчитанной точкой .Но отклонение траектории будет в единицы градусов .
А мне нужно чтобы отклонение стало в 10 град.
Чем пугает Нен? Тем, что при стрельбе был использована программа полёта в точку встречи.
Но это не факт. Могла быть загружена и другая программа. Например, такая
2014 г
______________________________________________
Встречал ОБС), что по высотным целям бук стреляет сначала вертикально (почти), ракета выходит на высоту цели и летит горизонтально в расчетную точку встречи. На этом горизонтальном участке осуществляется 5-тактовая коррекция траектории.
***
Существует несколько методов наведения ракеты на цель. К примеру, метод трех точек, половинного спрямления, параллельного сближения, пропорционального наведения, и даже есть такой метод погони.
http://mylect.ru/transport/416-poletteo … ?start=17.
***Мне рассказывали так:
Цель на дальней границе ЗП, поэтому сначала 60 град (х/з это примерно), а через 7...8 сек полета плавный доворот на цель с 9-й по 20 секунды полета. Это в вертикальной плоскости.
формулы расчета скорости ракеты на траектории:
Первые 11 км скорость считаете по формуле V (м/с) = 55хВремяПолета. Затем V (м/с) на каждый километр пути ракеты падает примерно на 15 м/с (на высоте 10 км, чем ниже высота, тем больше).
***
Не надо никаких фантазий: ракета Бука-САМОНАВОДЯЩАЯСЯ по методу пропорциональной навигации с полуактивным наведением.
Т.е. радар СОУ облучает цель, ГСН принимает отраженный сигнал и вырабатывает команды на рули, которые ВЕДУТ РАКЕТУ В УПРЕЖДЕННУЮ ТОЧКУ. И ВСЁ.
***
Цитата
"Для обеспечения поражения цели на дальней границе зоны поражения в комплексе используется метод автономного наведения ракеты на цель на начальном участке траектории без радиолокац. контакта с целью.для реализации этого метода в состав ракеты включен бортовой вычислитель(БВ),в который до старта ракеты вводится полетное задание на траекторию .Полетное задание рассчитывается из условия равномерного и прямолинейного полета цели после пуска ракеты".
******
2015 г
____________________________________
Реально угол еще ближе к перепендикуляру, градусов на 3-5 из-за пропорционального наведения - ибо на рисунке это траектория кратчайшего пути - такого сейчас не применяют.
***
Более того, ракета имеет пропорциональное наведение - она летела не в полученную мной точку (от балды в пределах +-1км в данном случае - но углы из-за больших расстояний все равно верны), а слегка доворачивала на самолет с опережением, чтобы угол между скоростью Боинга и ее скоростью оставался постоянным и оптимальным с точки зрения энергетики - это один из самых экономичных режимов в случае маневрирующей цели.
***
Она же не знает, что самолет не маневренный, поэтому не идет на точку сбития, а следит за траекторией самолета и подворачивает к нему - вдруг он бы сейчас мотнулся вправо, чтобы уйти от ракеты.
***
А говорилось так именно, что проектируется не траектория, а алгоритм. В зависимости от множества параметров автоматика принимает те или иные решения, оптимальные для поражения. Мы не имеем даже наземной точки поражения (про пуск также большие вопросы), что можно сказать о "циклограмме" решений секретного изделия, и тем более траектории??
****
Траектория ракеты алгоритмами формируется так, чтобы при любом противоракетном маневре иметь возможность сбить цель. При этом она анализирует и скорость, и ускорение цели, подстраивая свой курс. Реальный курс ракеты был по кривой между двумя моими линиями. Да, алгоритмы секретны, но в общем они отличаются коэффициентами пропорциональности - крутизной кривой - все равно траектрия должна была находиться между двумя сторонами треугольника.
***
Алгоритм прицеливания ракеты предполагает прямолинейное движение цели.Эта особенность ракет используется пилотами при уходе от атаки ракет -применяются резкие манёвры и фигуры высшего пилотажа .
***
В комплексе используется одноступенчатая твердотопливная ракета (ЗУР 9М38М1) класса поверхность-воздух средней дальности с инерциальным наведением на начальном участке и самонаведением на конечном участке.
***
ракета на инерциалке уходит максимально вверх по наиболее выгодной траектории, потом радиокоррекция ее разворачивает на цель. Благо диаграмма направленности 30см антенны на 4см длины волны порядка 9 градусов по уровню минус 3дБ. На 20 км это пятно в 3км диаметром.
***
Какую траекторию полетным заданием заложили при старте в бортовой вычислитель (БВ) - по такой ракета и полетит до точки встречи. ГСН только для "подруливания" на последних сотнях метров.
***
Дает он и скорость и угол места и наклонную дальность. В режиме сопровождения точность по высоте, как сказал мой коллега из соседнего офиса, который в КПИ изучал Бук, на расстоянии 30км будет порядка +-350м. Т.е 10.5км они отследили бы. Расстояние тоже вычислялось достаточно точно. Эта тачка в ракету передает полетное задание и матмодель цели в виде величины сигнала в попугаях, дальности, скорости и угловых ускорений. Ракета после 5-6 секунд неуправляемого полета настраивается на канал радиокоррекции и опорный. Коррекция доводит до направления на цель, а по опорному (прямому с СОУ) сигналу с антенны на хвосте вычисляется точное наклонное расстояние до цели (+-100м) по разности частот ЛЧМ отраженной и опорного канала. Плюс сравниваются параметры матмодели, и где-то раз в 1 миллисекунду корректируется оптимальная траектория на цель.
***
Я точно знаю, что при наведении современных ракет используется метод пропорционального наведения (сближения). Я точно знаю, в чём состоит его суть. Я точно знаю, что при таком способе наведения вектор скорости ракеты направлен в упреждённую точку, а не в "геометрический центр цели". Я точно знаю, что, если цель не маневрирует и летит прямолинейно с постоянной скоростью, траектория полёта ракеты является, практически, прямолинейной, то есть, наиболее энергоэффективной.Я точно знаю, что в этом случае ось антенны ГСН ракеты направлена строго на цель, отслеживая линию визирования цели, а также её угловую скорость в системе координат ракеты.
***
Ракета же всегда летит в сторону цели... если под этим подразумевать вполне себе достоверный факт уменьшение расстояния между ними. Однако при методе наведения "пропорциональное сближение" ракета летит именно в "вычисленную точку" - прогнозируемое место её "встречи" с целью.
***
Для ЗУР среднего и дальнего радиуса действия коэффициент 1 ("погоня") не применяется нигде и ни при каких условиях. Параметр навигационной постоянной задается еще на старте, причем таким образом, чтобы траектория полета ракеты к цели была как можно ближе к прямой (это увеличивает радиус зоны поражения). Если весь полет угол направления на цель не меняется, то К = бесконечности (реализуется метод параллельного сближения).
В процессе полета, если угол направления на цель меняется, то вырабатывается разница между "навигационной постоянной" и реальным углом визирования на цель и вырабатывается коэффициент поправки ~ Угол цели / разницу углов. При к = 4 скорее всего уже сработает взрыватель, хотя Х/З никогда не задавался этим вопросом. В среднем его величина составляет от нескольких единиц до нескольких десятков единиц.
Также следует учитывать, что:
- при пуске к цели вблизи дальней границы поражения ракета сначала идет почти вертикально (чтобы быстрее преодолеть плотные слои атмосферы и потерять минимум энергетики двигателя). Для целей вблизи ближней границы ЗП этот участок может отсутствовать вовсе.
- набрав высоту ракета доворачивает в направлении цели и летит примерно в точку встречи. Но если величина рассогласования на этом участке полета становится значительной (цель меняет курс полета, маневрирует и т.п.), то включается 3-й этап полета (см. ниже).
- при приближении к цели величина рассогласования начинает нарастать и включается режим полета по поправочным коэффициентам, где в зависимости от угла рассогласования вырабатывается поправка на направление полета ракеты. Но все равно при этом направление полета ракеты НЕ совпадает с направлением на цель (почти никогда) и ракета по прежнему пытается идти в предполагаемую точку встречи.
Наконец (вблизи цели) рассогласование становится настолько большим, что ракета уже не в состоянии так быстро менять направление траектории полета, отклонения нарастают лавинообразно и ... срабатывают взрыватели БЧ.
Именно поэтому кривая полета ракеты к цели почти всегда "выпуклая", а не "вогнутая" (как для случая "собачьей погони за хвостом")
***
Например динамика полета, тесно связанная с аэродинамикой.
Может некоторые думают, что ракета летит как влитая, одним глазом кося на цель?
Ничуть не бывало!
Ракета летит непрерывно раскачиваясь в двух плоскостях с довольно большой амплитудой.
И устранить эту раскачку совсем невозможно, потому, как уже приводил цитату из Федосова, если её задемпфировать наглухо, она станет "тупой" и инерционной.
Да еще скорость ракеты, если пуск на максимальную дальность, сначала вырастает до максимума, а потом довольно быстро падает.
В результате та же пресловутая "упрежденная точка" постоянно уходит вперед от цели (напоминаю: цель движется прямолинейно и с постоянной скоростью!).
И ракета все время вынуждена доворачивать, что всегда сопровождается колебаниями.
А для того, чтобы ракета не упала, она еще должна создавать подъемную силу, все время добавляя угол атаки, что тоже приводит к колебаниям.
Поэтому считать траекторию прямой и пытаться её экстраполировать назад к месту пуска могут только полные дилетанты.
***
В реж. Обзора ЦВС решает задачу стабилизации зоны поиска РЛС в плоскости угла места с учетом угла крена гусеничной машины.
В реж. Обнаружения и захвата – ЦВС осуществляет вывод антенны РЛС в направлении В.Ц. для чего используется информация БЦО – импульс начала пачки и конца.
Реж. Захвата – в реж. КНИ решает задачи: определение однозначной дальности до В.Ц., определение однозначной скорости, выбор оптимальных частот повторений РЛС.
Реж. Сопровождения, задачи:
- экстраполяция траектории движения В.Ц.
- выработка сигналов наведения ПУ в упрежденную точку
- выработка сигналов наведения РГСН в направлении В.Ц.
- выработка сигналов управления ТОВ
- выработка сигналов управления каналом НЛЦ
- расчет полетного задания, ближней и дальней границ зоны поражения, определения пуска ЗУР.
...
Основные алгоритмы
1. Алгоритм «ввод внешней информации»
Этот алгоритм предназначен для организации обмена информацией ЦВС с внешними абонентами, а также для имитации координат ЦУ от КП и координат цели.
2. Алгоритм «управления ПУ»
предназн. Для выработки сигналов управления для вывода платформы и лафета ПУ на требуемые углы, зависящие от режимов работы СОУ
3. Алгоритм «Фильтры 9С471М1»
предназн. Для вторичной обработки информации о В.Ц. в режиме сопровождения.
4. Алгоритм «Встреча».
Предназн. Для определения координат упрежденной точки встречи ракеты с целью.
Координаты упрежденной точки рассчитываются в любой момент реального времени.
5. Алгоритм Зона»
Предназн. для определения времени входа Ц. в зону поражения
***
В методичке Ельцина:
Наведение на цель начинается с азимутального разворота направляющих ПУ в направлении цели. Поскольку в комплексе принят комбинированный метод наведения ракеты - инерциальный наведение с радио коррекцией на начальном участке наведения и полуактивное самонаведение на конечном участке траектории, то после старта примерно в течении 24 с ракета управляется автономно. Управление обеспечивается введением в ГСН так называемого псевдокинематического звена, по сути упрощенной инерциальный системы управления. Для эффективного наведения ЗРК на маневрирующие цели на этом участке используется радиокоррекция траектории.
***
Думаю, что из этих 5-ти алгоритмов
Основные алгоритмы
1. Алгоритм «ввод внешней информации»
Этот алгоритм предназначен для организации обмена информацией ЦВС с внешними абонентами, а также для имитации координат ЦУ от КП и координат цели.
2. Алгоритм «управления ПУ»
предназн. Для выработки сигналов управления для вывода платформы и лафета ПУ на требуемые углы, зависящие от режимов работы СОУ
3. Алгоритм «Фильтры 9С471М1»
предназн. Для вторичной обработки информации о В.Ц. в режиме сопровождения.
4. Алгоритм «Встреча».
Предназн. Для определения координат упрежденной точки встречи ракеты с целью.
Координаты упрежденной точки рассчитываются в любой момент реального времени.
5. Алгоритм Зона»
Предназн. для определения времени входа Ц. в зону поражения
для упрощения модели можно взять толькри №2 и №4.
Связь с начальством, подсветку и определение зоны пока можно не учитывать, т.к. они не влияют на траекторию активного и пассивного участков полёта
Бут дал хорошее описание поведения ракеты при действии ветров. Спасибо ему за это!
Речь об упреждающей точке встречи.
Простой, Вы понимаете нюансы двух следующих двух вариантов?
1. Пуск из-под Снежное - поражение в Last FDR point.
В связи с тем, что угол между линией "СОУ - Last FDR point" и направлением 118° (курс МН17) небольшой, то любые возмущающие факторы, ускоряющие или тормозящие ЗУР, приведут к НЕзначительному изменению угла подхода ЗУР к боингу - ускоряющие сделают угол ЧУТЬ острее, тормозящие сделают ЧУТЬ тупее.2. Пуск из района Шапошниково - поражение в Last FDR point.
В связи с тем, что угол между линией "СОУ - Last FDR point" и направлением 118° (курс МН17) очень большой, то любые возмущающие факторы, ускоряющие или тормозящие ЗУР, приведут к ЗНАЧИТЕЛЬНОМУ изменению угла подхода ЗУР к боингу - ускоряющие сделают угол ОЩУТИМО острее, тормозящие сделают ОЩУТИМО тупее.В первом варианте, взлетев в направлении 324°, ЗУР никак не сможет подойти к оси боинга под 27°, которые DSB натянуло на кокпит.
Во втором варианте, изменение угла может быть значительным.
Например, алгоритм ВСТРЕЧА исходит из того, что атмосфера полета ЗУР - максимально сильные встречные ветры***. В нашем случае на основании этого он рассчитал точку встречи в каком-то определенном направлении, например, чуть восточнее Рассыпное. ЗУР взлетает и на высотах начиная с 6 км встречает нежданчик - подгоняющий ветер, далее усиливающийся с высотой. В итоге скорость ветра плюсуется к скорости ЗУР и время до точки встречи уменьшается. Но МН17 летит прежним курсом с прежней скоростью, и за меньшее время не долетит в место гибели. Поэтому ЗУР, не будучи Терминатором N-й серии, способным управлять другими машинами, сама начинает доворачивать на запад и встречается с МН17 в Last FDR point под углом, бОльшим, чем угол, если бы не было подгоняющего ветра. А последний угол сам по себе больше, чем угол между линией "СОУ - Last FDR point" и направлением 118° (курс МН17).*** - Почему в расчет берутся максимально сильные встречные ветры? Вот именно потому, чтобы в конечном итоге угол подхода ЗУР к цели был максимально острым, а не затуплялся, или вообще приходилось догонять цель, а для этого "перекладываться на другой борт" и терять кинетику. Почему острее - лучше? Увеличивается вероятность поражения цели.
Думаю, что его техническое описание можно взять за основу технического задания для моделирования.
Но я хотел бы переложить эти ТУ на решение обратной задачи: по углу подлёта ракеты в 27 град к оси боинга отложить посекундно положение ракеты при разных методах наведения.
И моделировать ситуацию, как мне думается, нужно для подлёта ракеты к боингу сверху. Я в этом убеждён потому, что зона поражения на кокпите об этом свидетельствует - только при таком положении БЧ большАя часть ПЭ потеряется при падении кокпита.
Самая неизвестная нам величина для моделирования - скорость ракеты в момент контакта. Но мы можем промоделировать для любой скорости, если будем решать обратную задачу. Главным критерием правдоподобия в данном случае является время работы двигателя ракеты. Следствие эксперементально установило, что это время составляет 13 сек.
можно и с пули начать. А потом нарашивать на неё и ветер, и услрвия угловых "воронок", и замедление скорости...
Ночь не спал, думал, как бы так исхитрится, чтобы делать поменьше, а получить побольше.
Пока придумал только это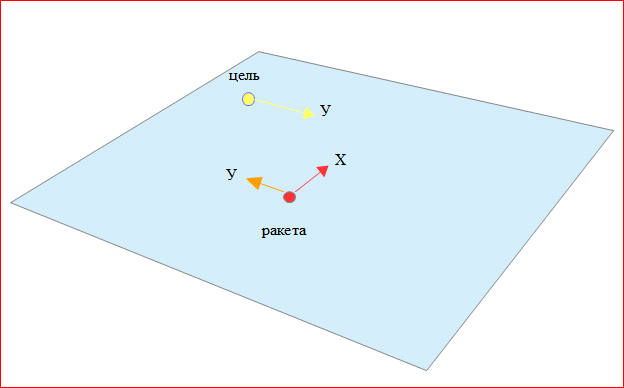
Т.е. разложим задачу на составные части. Движение ракеты в вертикальной плоскости и движение в горизонтальной плоскости.
Сначала попробуем для горизонтальной смоделировать - мне кажется это будет проще для начала.
Упростим вводные данные:
1) Цель и ракета - материальные точки, имеющие массу, площадь и скорость
2) Цель движется только во вектору Х
3) Ракета движется в координатах Х и У
Начальная точка - место встречи цели и ракеты: Х=0, У=0
определим порядок расчёта.
Примем за шаг расчёта время = 1 сек. (t=1)
Тогда за 1 сек до столкновения точки могли находиться на расстоянии от точки столкновения пропорциональном их скоростям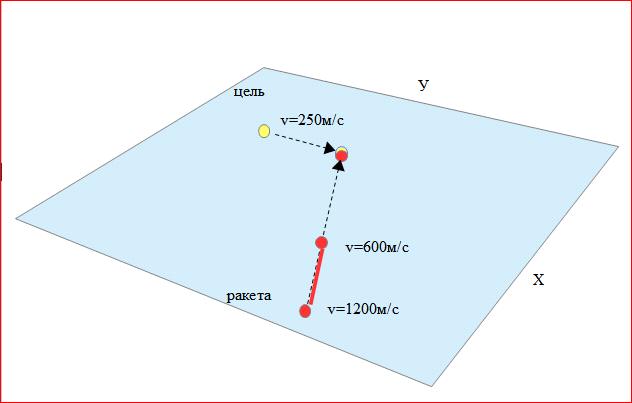
Так как мы не знаем скорость ракеты при столкновении, то нам нужно просчитать все возможные скорости. Думаю, что в момент встречи ракета не могла иметь скорость больше 1200м/с и не менее 600 м/с. Примем их да расчётный диапазон. Если что - этот диапазон можно будет расширить.
Таким образом, при первой итерации расстояние цели до места столкновения было 250м, а ракеты от 600 до 1200 м.
v1=250 //скорость цели
v2=func_v //скорость ракеты
L1 =v1*t // расстояние цели до места встречи
L2=V2*t // расстояние ракеты до места встречи
func_v эта величина отражает зависимость скорости ракеты на инерционном участке полёта от сопротивления воздуха.
Теперь создадим блок, который нам будет считать, где находилась ракета (в горизонтальной плоскости) за 1, 2, 3... n секунд до столкновения.
Для этого нам нужны координаты ракеты на плоскости в каждый момент времени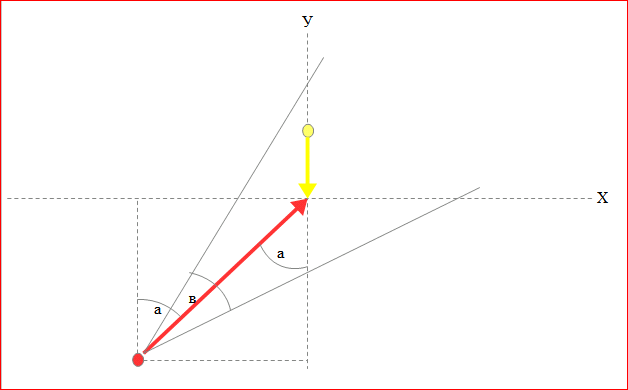
У нас есть начальное условие: Угол столкновения цели и ракеты = 27 град. (угол а)
Поэтому, за секунду до столкновения ракета находилась в точке плоскости с координатами :
x = Cos(a) * L2 // координата по оси Х
y = Sin(a) * L2 // координата по оси У
А какие координаты будут за 2 секунды до столкновения?
Смотрим: увеличивается расстояние L2 за счёт увеличения необходимого времени движения, меняется скорость ракеты (увеличивается) при неизменной скорости цели.
И появляется условие: цель должна попадать в угол прицеливания ракеты (в).
Все эти изменения и условия нужно описать математически...
Я предлагаю условия сохранения направления движения ракеты установить из расчёта этих двух треугольников
т.е. будем сравнивать расстояние ОД с L1 (расстояние цели до места столкновения). И если L1 > ОД, то вектор движения ракеты будем менять, а если L1=< ОД, то направление движения не меняется (трубка прицеливания).
Величина ОД будет зависить от вектора движения ракеты и её координат:
ОД =АБ*БС/ОС,
где
АБ - координата ракету по оси У
БС+ОС - координата ракеты по оси Х
БС =АБ* tg(a-в/2)
Я предлагаю условия сохранения направления движения ракеты установить из расчёта этих двух треугольников
т.е. будем сравнивать расстояние ОД с L1 (расстояние цели до места столкновения). И если L1 > ОД, то вектор движения ракеты будем менять, а если L1=< ОД, то направление движения не меняется (трубка прицеливания).
Величина ОД будет зависить от вектора движения ракеты и её координат:
ОД =АБ*БС/ОС,
где
АБ - координата ракету по оси У
БС+ОС - координата ракеты по оси ХБС =АБ* tg(a-в/2)
А ничё ,что треугольник похож на "кирпич "?)))
//Программа определения условия подворота ракеты на цель
v1=250 //скорость цели
v2=600 //скорость ракеты в момент столкновения
a =27*3.14/180 // перевод в радианы угла столкновения
b=9/2*3.14/180 // перевод в радианы угла прицеливания
tg=tan(a-b) // тангенс разности угловfor t=0 to 30 step 1 // цикл по обратному отчёту времени от момента столкновения с шагом в 1 сек до 30 сек полёта ракеты
L1=v1*t // расчёт длины пути цели за период времени
L2=v2*t // расчёт длины пути ракеты за период времениX= cos(a)*L2 // координата ракеты по оси Х
Y=sin(a)*L2 // координата ракеты по оси Уlim=(X-tg*Y)/tg // определение прицельной длины участка движения цели
if ABS(lim)<L1 goto K // условие выхода цели из прицела
next t // конец цикла по времени
K:
print "повернуть ракету на 4,5 градуса влево"STOP
в данном алгоритме нет ни замедления скорости ракеты от сопротивления воздуха, ни сноса ветром. Это просто болванка, на которую будем всё это навешивать.
Но уже можно сделать следующие выводы:
1. Угол столкновения, при котором цель будет находится на границе прицела составляет 40,23 град
2. При уменьшении угла столкновения менее указанного ракета может лететь прямо без подворачивания всю дорогу.
3. При величине угла столкновения больше указанного ракета всё время должна будет подворачивать
4. Увеличение скорости ракеты в момент сколкновения более 600 м/с увеличит границу прицеливания (не нужно подворачивать)
5. Уменьшение скорости ракеты в момент столкновения менее 600 м/с уменьшит границу прицеливания (нужно подворачивать)
Теперь можно занятся и ветром.
Ветер имеет скорость и направление. Он тормозит или увеличивает скорость ракеты, но главное - сдувает её с пути истенного.
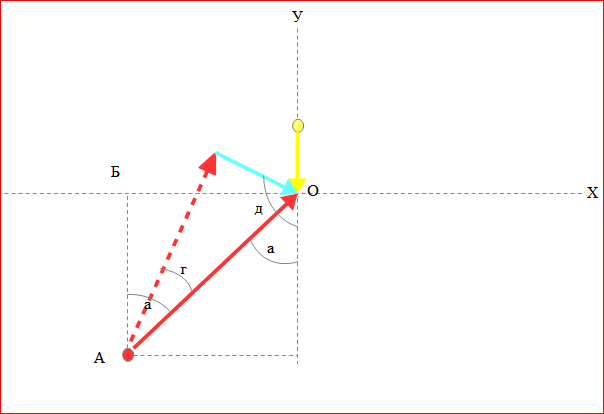
Т.е., чтобы столкнутся с целью под заданным углом ракета должна лететь (красный пунктир) с компенсацией сноса ветром (голубой вектор).
Нас интересует угол "г" -угол компенсации сноса .
Для этого нужно по двум сторонам (скорость ветра и скорость ракеты) и угла между ними (разница углов направления ветра "д" и угла столкновения "а") найти угол "г"
Теперь можно занятся и ветром.
Ветер имеет скорость и направление. Он тормозит или увеличивает скорость ракеты, но главное - сдувает её с пути истенного.Т.е., чтобы столкнутся с целью под заданным углом ракета должна лететь (красный пунктир) с компенсацией сноса ветром (голубой вектор).
Нас интересует угол "г" -угол компенсации сноса .
Для этого нужно по двум сторонам (скорость ветра и скорость ракеты) и угла между ними (разница углов направления ветра "д" и угла столкновения "а") найти угол "г"
Этот угол десятые доли градуса .Тебе они интересны ?
Этот угол десятые доли градуса .Тебе они интересны ?
Да, уже понял, что это мало! 
E-МАЕ
-нам Ваши предположения совершенно неинтересны.
Да-это предположение ,оценка .Посмотри ,как сносит БОИНГ на эшелоне .А ракету будет сносить многократно меньше .У неё нет вертикально оперения .
УЧЕТ ВЛИЯНИЯ ВЕТРА НА ПОЛЕТ НЕУПРАВЛЯЕМЫХ РАКЕТ И СНАРЯДОВ
Похоже, что я выбрал не верный вариант сноса ветром!
При указанной выше схеме меняется угол встречи. А нам нужно выдержать угол в 27 град!
Будем использовать параллельный снос.
Итак, мы с Раливом решили, что для того, чтобы ракета подлетела к цели под определённым углом под действием ветра, нужно чтобы за секунду до этого ракета уже находилась в точке ветрового смещения. Трудно объяснить -проще на схеме показать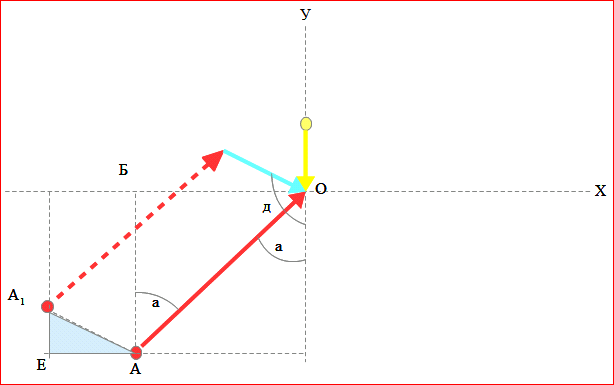
Т.е. исходим из того, что за секунду до столкновения ракету ветром сносит не из точки "А" , а из точки "А1". Т.е. она летит под углом 27 град к курсу цели и постоянно смещается по оси Х.
Конечно, она будет смещатся от ветра и по оси У: если ракета летит на ветер, то смещение будет вниз по схеме, а если по ветру - то вверх по схеме.
Т.е. нам нужно найти новую точку место положения ракет за сек до столкновения.
Искать будем на основании указанного треугольника:
Сторона А1А равна скорости ветра.
Угол А = углу направоения ветра относительно направления движения цели (ось У) - 90 град. (Если азимут ветра > 90 град)
Тогда к безветренным координатам положения А нужно будет добавить /отнять размеры катетов треугольника.
В нашем случае к координате А по Х нужно добавить АЕ, а по У - отнять ЕА1.
Новая координата точки, где находилась ракета за сек до встречи:
А1(Ах+скор.ветра*cosА; Ау - скор.ветра*sinА)
да, Ралив прав - нужно ближе к нашему случаю брать модель. Ветер на высоте 10 км был 20 м/с, с направлением 45 град. Это практически навстречу в правый борт боинга и попутно ракете в левый борт.
На схеме это будет примерно так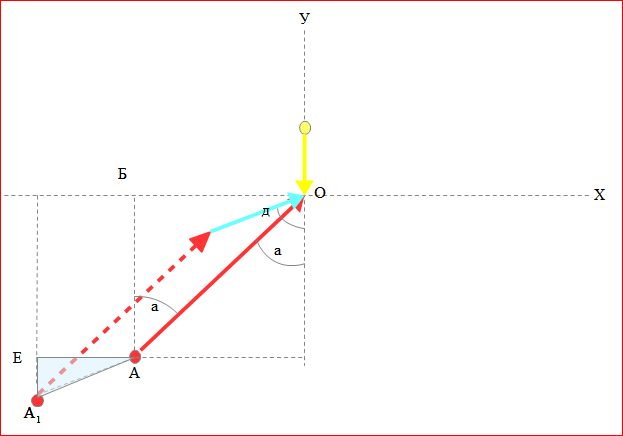
Расчёт будет почти такой же, за исключением угла треугольника
Угол А = 90 - угол направления ветра к оси У (угол ветра < 90 град)
И точка в которой находилась ракета за сек до столкновения будет по оси Х будет как и в первом случае, в по оси У больше на ЕА1.
Проверка чувствительности модели на изменения направления и скорость ветра.
Начальные условия:
Направление ветра - 56 град к курсу цели
Скорость ветра - 20 м/с
Эти данные менялись (уменьшались) с каждым шагов по времени на 5 град и на 5 м/с.
скорость и направление ветра не меняется
время координаты Х У
столкновение 0 0
1 сек до столкновения 545.8 288.8
2 сек до столкновения 1626.3 849.9
3 сек до стролкновения 3241.5 1683.3
4 сек до столкновения 5391.4 2788.9
Изменение угла ветра (уменьшение) при постоянной скорости ветра
0 0
547.2 287.8
1630.4 846.7
3249.6 1676.6
5404.4 2777.4
Уменьшение скорости ветра при постоянном угле
0 0
543.0 284.6
1617.9 837.5
3224.8 1658.4
5363.4 2747.5
изменение угла (уменьшение) и уменьшение скорости ветра
0 0
544.1 283.9
1620.4 835.6
3228.1 1655.7
5366.8 2744.7
Т.е. результаты свидетельствуют что модель реагирует на изменения параметров ветра
Ушен. мог бы давно напомнить, что ты уже всё сделал!
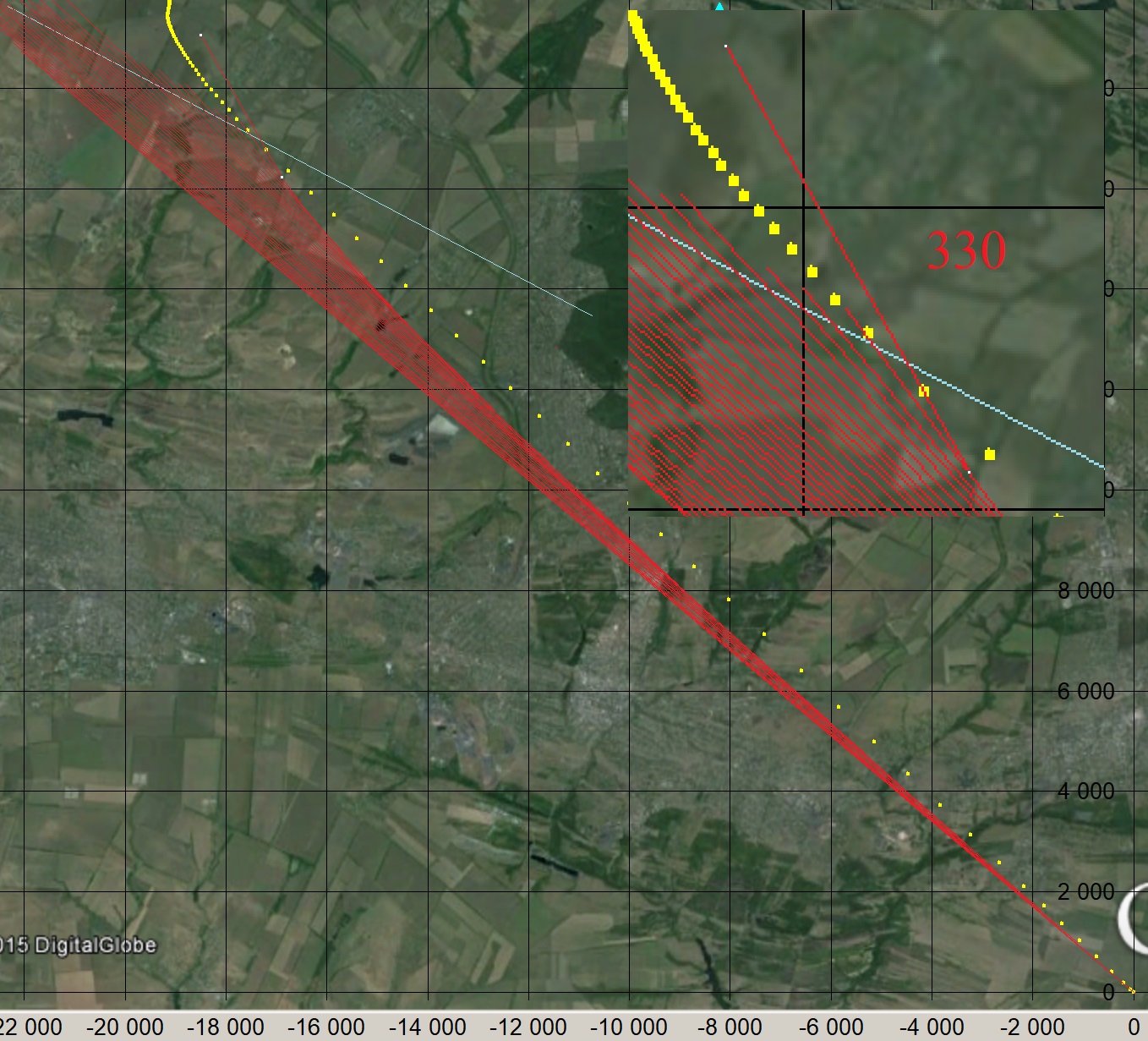
Уж коли вернулись к следу, очередной раз вспомнил про Угол DSB 27 градусов, что приводит к азимуту полета ракеты в точке поражения 330.
А что если - ракета все время идет на цель?
У меня есть график движения - через каждую секунду обозначаю местоположение ракеты, местоположение самолета и соединяю их.
Ракета летит 34.5 секунды. Самолет в 8 с лишним километрах...И вот такое совпадение:
Осталось только к твоей трассе добавить ветровые сносы - но, похоже, что там сущая мелочь будет!
например: Без ветра, за 5 сек до столкновения (около 8 км дальности), и при ветре =20м/с коодинаты ракеты будут:
без ветра на 5 сек Х=8020 У=4084
с ветром =20м/с Х=8076 У=4167
-------------------------------------------
Т.е. Разница составит Х=56 м У=183 м
например: Без ветра, за 5 сек до столкновения (около 8 км дальности), и при ветре =20м/с коодинаты ракеты будут:
без ветра на 5 сек Х=8020 У=4084
с ветром =20м/с Х=8076 У=4167
-------------------------------------------
Т.е. Разница составит Х=56 м У=183 м
Ветер у меня всегда есть, но сама ракета (или самолёт, или обломок) - физическая точка, которой я приписываю какие-то аэродинамические свойства.
Я, оказывается, в точности повторил Вашу (или давай на ты, твою) картинку от 16.07.2020.
Моделировать поведение ракеты мне всегда казалось затеей бессмысленной, я не берусь предсказывать, я только описываю - если летела так, то из энергетических соображений - происходило это вот так.
Но почему бы не попробовать?
Самый простой вариант - летим со скоростью, полученной на предыдущем шаге в точку, посчитанную как "угловая скорость * шаг".
Получится кривая в 3D, чуть длиннее, чем описываемая траектория.
Дав "чуть прирост скорости", я смогу привести ее в точку поражения и померить угол.
Самый простой вариант - летим со скоростью, полученной на предыдущем шаге в точку, посчитанную как "угловая скорость * шаг".
Получится кривая в 3D, чуть длиннее, чем описываемая траектория.
Дав "чуть прирост скорости", я смогу привести ее в точку поражения и померить угол.
Думаю, что можно чуть усложнить эту схему, включив на каждом шаге проверку условий Нена - его любимые 3-10 град. Чисто для того, чтобы он прекратил об этом говорить 
Т.е. ты уже доказал, что метод наведения был использован именно такой, а никакой не с упреждением. Тогда и угол встречи был такой, какой утверждало следствие.
Жаль красивые версии Бута и Басара, но, получается, что в боинг попала снеженская ракета
Думаю, что можно чуть усложнить эту схему, включив на каждом шаге проверку условий Нена - его любимые 3-10 град. Чисто для того, чтобы он прекратил об этом говорить
Т.е. ты уже доказал, что метод наведения был использован именно такой, а никакой не с упреждением. Тогда и угол встречи был такой, какой утверждало следствие.
Жаль красивые версии Бута и Басара, но, получается, что в боинг попала снеженская ракета
Подумаю, что можно сделать, ничего не переделывая - у меня просто решения диффура, а как заставить ракету в заданную точку лететь - такого нет.
Поэтому пока вариант - стреляем прямо, те же скорости берем (чуть увеличенные - подгоном) и параллельно строим траекторию с теми же скоростями и заданными направлениями в каждый момент.
Но боюсь, что так любой желаемый угол можно получить...
Бутблек меня очень смутил очередным (хорошо забытым) свидетельством: http://mh17.webtalk.ru/viewtopic.php?id … p=4#p89740
У ПЭ на земле должны быть "полосы концинтрации" (Правда, взимут 310 - это из Бук2 на точку, где боинг был в момент предполагаемого выстрела из Бук2):
По описанию: "Металлические кусочки... мелкие куски по крыше сразу пошли, а потом уже как пошло лететь".
Где еще можно рассчитывать отыскать ПЭ, как не на крышах? Но такая "россыпь" может быть только в этих "полосах концентрации".
Расположение дома Петра Литвиненко, которое указал Бутблек - никак на приход ракеты с Юга не тянет, а вот со стороны Снежного - вполне.
Особенно если вернуть точку поражения поближе к Last FDR (ну еще бы немножко увеличить Cx ПЭ - на картинке не отражено).
Но - РВШ говорит, что ракета вроде Бука на скорости порядка 500-600 м/с должна иметь угол атаки под 10 градусов, - даже если летит в горизонте, тангаж под 10 градусов. У меня тангаж есть, а угла атаки нет - вектор скорости ракеты направлен вдоль оси, что заведомо неверно, надо бы собраться с духом и еще помучиться...
Да, а насчет "уже все доказал, лучше гор могут быть только горы..." - вот может ты мне объяснишь, что хотел сказать Сложный про первое фото Алейникова - "изначально след был наклонён вправо... К моменту съёмки он выровнялся"?
Ответом могло бы быть - пуск с пятна Олифанта, т.е. почти в момент съемки - по ширине следа не прокатит... Да и времянка.
Что там совсем другой ветер? А поле горело как при "таком" ветре?
Ну и вдогонку, на роликах про сбивающие мишень ракеты что-то я не припомню подобных выкрутасов перед самым попаданием, всегда впечатление, что ракета сделает пару движений а потом идет по прямой в точку встречи.
Так что о "доказал" и речи нет.
Отредактировано uschen (2020-07-26 00:59:14)
Нен упорствует, принуждая нас принять неверный алгоритм наведения
Но мы будем считать по другому: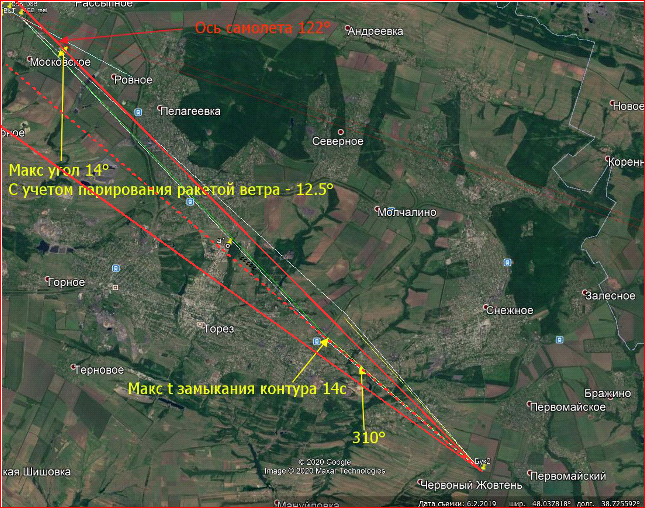
выстрел туда, где был боинг в момент старта ракеты.
И пусть через 14 сек полёта происходит замыкание контура самонаведения - боинг всё равно находится в области прицеливания. С этого момента ракета начинает "загонять" отметку в центр прицела (самонаведение). Мы можем это сделать 1 раз в сек, хотя ракета делает эту коррекцию чаще.

Нен упорствует, принуждая нас принять неверный алгоритм наведения
Да алгоритм там на основе пропорционального наведения. Важны детали, а достоверной инфы по ним нет. Есть лажа из учебников. А Чекист просто использует свои стандартные гбшные манипуляции. Во-первых, если подсвет есть с самого момента пуска, ничто не мешает антенне ракеты отслеживать цель. Управляется ракета до "замыкания контура", или летит по прямой, какая в жопу разница? Антенна всё равно отслеживает цель, качаясь вокруг направления на отражённый сигнал. Углы поворота у неё до 45° от оси ракеты или что-то типа этого. Если пуск осуществляется без подсвета, то СОУ должна выдать задание ракете установить антенну в такое-то положение относительно оси, когда включится подсвет (также есть ещё и возможность радиоуправления в полёте, если цель заманеврировала), и это опять безотносительно направления полёта ракеты. Главное, чтобы цель при этом оказалась в пределах нужных частей лепестков диаграмм направленности, то есть тех самых единиц градусов от направления антенны, о которых всё время талдычит Чекист. То есть, важна точность установки углов антенны при включении подсвета, а не насколько вектор скорости ракеты отклонён от направления на расчётную точку встречи.
А Чекист просто использует свои стандартные гбшные манипуляции.
И на это попытался сманипулировать:
Странные вещи на реплике.
Само собой, прежде чем замкнуть контур, нужно захватить цель. Когда - не суть. Ибо. ГСН видит, что равносигнальное направление на цель начало сильно отклоняться от расчетной линии визирования. Действия?
1. Печально сопровождать взглядом, поворачивая вслед голову (антенну), надеясь, вдруг потом догоню, если цель не повернется вообще на 90 или 180°.
2. Замкнуть контур и скомпенсировать ошибку - ибо ракета априори не знает это ошибка прицеливания с какой-то неучтенкой, или цель приняла своим СПО сигнатуру подсвета и начала противоракетный маневр, и чем раньше установленного полетным заданием Тэт замкнется контур, тем меньше будет ошибка (в данном случае и угол между осями). Выполнить предназначение по выполнению боевой задачи или уподобиться инфантильной дурочке с девизом "Уходя уходи"?
Но в любом случае. Тэт=14с и ошибка макс 4.5° - наихудший вариант, который приведет при Ту=27с к максимальному углу между осями без учета ветра для ракеты 14° или 12.5 с учетом либо макс 12.5° для Ту=33сек
Сначала дезавуировал свою лажу и оправдал её тем, что ракете "печально сопровождать взглядом [цель]", и она не "инфантильная дурочка". Ведь именно так должен контраргументировать в вопросе по техническим ограничениям в навигации ракет крутой спец по ГСН, что ж вы думали... После чего тупо повторил свою лажу. Это что было, наёбка для гуманитарно одарённых? Для таковых поясню: вопрос в том, насколько неоптимальным мог быть азимут, в направлении которого произведён пуск по неманеврирующей цели, чтобы ракета тем не менее эту цель поразила? При заданных векторе скорости цели и взаиморасположении цели и СОУ на момент пуска. Ясен пень, что градусов 10° в сторону - это вообще ни о чём. А было меньше. А если Чекист хочет втереть, что пуск по неоптимальному азимуту невозможен, то доказательства - в студию.
Вы здесь » Как сбит MH17: гражданское расследование » Отчёты, расследования, экспертизы » Как летает ракета 9М38. Моделирование.